
This is the second post in series of Scorpion Vision Software important tool improvements included in upcoming – Scorpion Vision XII.
We have used the Scorpion Demo Profile – SDP-0079 Basic Robot Vision to verify and check the important improvement of TemplateFinder3. This tool provide object sub-pixel 2D object location in Scorpion. The both speed improvements and more robustness.

2D Object location is also important in our award winning 3D Stereo Vision solutions and our OEM products using low cost lenses and cameras.
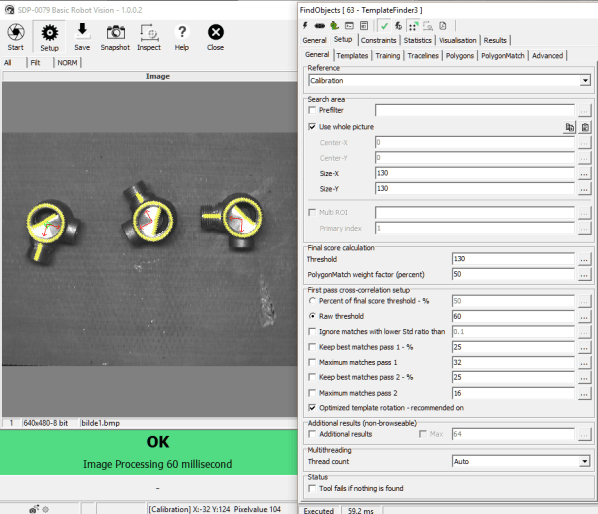
Before – Scorpion Vision XI locates three valves in 60 ms
Now – The improved TemplateFinder3 locates the valves in 11 ms – 6x faster
- The update is easy to activate
- only the section First pass cross-correlation section is updated.
- The candidates in the first crosscorrelation steps are sorted and the user can specify how many candidates to keep.
- In this setup 32 candidates are kept from the first and 16 from the second
- The changes has the following basic properties
- Easier to set up Tf3 using maximum limit
- The tool can handles many more templates without slowing down
- The tool has better real-time properties important in time critical systems


You must be logged in to post a comment.