 In this post we have used 3D images captured in the Auto3D research project. The image below captured with a stripelight projector to prove that a Battery Pack could be located in 3D and changed by a robot without human interaction on an offshore platform.
In this post we have used 3D images captured in the Auto3D research project. The image below captured with a stripelight projector to prove that a Battery Pack could be located in 3D and changed by a robot without human interaction on an offshore platform.
This is the third post in series of Scorpion Vision Software important tool improvements included in upcoming – Scorpion Vision XII.

In the Auto3D project we developed a 3D Pattern Matcher together with SINTEF named 3DMama – this was one of the first 3D pattern matchers in 2009. We have now taken a big step forward developing a significant better 3D Pattern Matcher STC-0124 ObjectFinder3D replacing 3DMama. The 3D pattern matcher has the following important features:
- Automatic model training and feature point selection and verification
- User defined number of featurepoints
- Locates multiple objects in 3D
- Very fast and easy training process
The ObjectFinder3D is optimised for dense 3D points cloud generated by 3D Stereo Vision like the Scorpion 3D Stinger Camera.
3D Model to locate Battery Pack
The image below shows the Learning page and the Battery Pack Model with 3D origin visualised.

Fast and robust location of Battery Pack
The battery is located in a 3D point cloud with 360.000 points in 102.5 ms. The 3D bounding and the pose is shown in red. The 3D pose – (x,y,z) and (rx,ry,rz) is calculated.

Use 3D Pose to verify Top Cover Shape
Once locating the battery pack it is easy to verify that all cover knobs are present. In 3D we can easily do the following with Scorpion Vision Software XII:
- Count the knobs
- Verify the 3D shape by
- Height
- Top Area
- Volume
- Check the rotation angle for each knob
All of these features makes it easy to verify the type of top cover. This important information can be used to select the right tool for replacing the battery pack or identification of the battery pack type to be replaced.
Scorpion Tools in Action
The following Scorpion Tools and STCs, Scorpion Tool Components, are used in the demo profile SDP-0006 ObjectFinder3D.
- 3DROI – STC-0094-ROICalculator 1.0.0.4
- Defines the 3D Region of interest
- ClusterFilter – STC-0111-ClusterFilter3D 1.0.0.22
- Can filter noise from a 3D Point Cloud
- FindValve – STC-0124 ObjectFinder3D 0.9.0.7
- Locates the valve in 3D based on a 3D Model
- LocateValvePlane – STC-0114 PlaneFit3D 0.9.0.16
- Precise plane location of the top cover
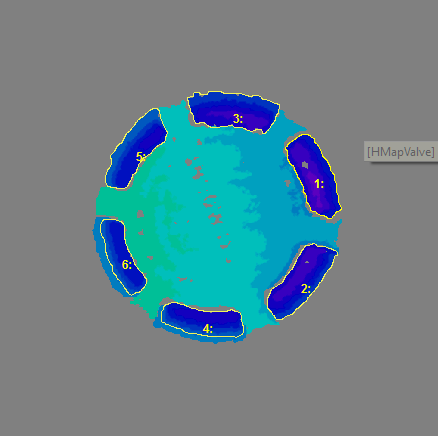
- HMapValve – Tool 122 – ExtractMap3D
- Extract the HeightMap of the Top Cover perpendicular to the top cover plane
- HeightHistogram – Tool 75 – Intensity
- Calculates the height map histogram
- FindKnobs – Tool – 87 – Blob4
- Locates the knobs in 3D in the heightmap

You must be logged in to post a comment.