One of the fundamental challenges in Machine Vision is to locate round objects. In Scorpion Vision X.II we are proud to announce a new significant tool – CircleFinder2D.
Ten years of knowledge and practical experience is built into CircleFinder2D
More than ten years after releasing RadialArcFinder a ransac based circlefinder with subpixel accuracy we have been working hard to create a new tool that meets the challenges our Scorpion 3D Stinger technology. The challenge is when we doubling the accuracy of a feature in 2D we also double the 3D depth resolution. With CircleFinder2D we have seen 2-4 times the accuracy in depth resolution in challenging 3D picking Robot Vision applications by just replacing RadialArcFinder by CircleFinder2D. This means that we can solve more application or lower the cost of existing solutions.
Last year we added the the Scorpion Tool Components – STC-0046 FindCircles that was based on Detect/Fitting Circles using Hough Transform in OpenCV and the STC-0039 EllipseFit that fits an ellipse from a collections of 2D points. These activities increased our understanding of circle finding and that we could create a CircleFinder2D that is significantly better than these implementations.
A selection of features in CircleFinder2D
- Works with Color Images – Low contrast detection in color images
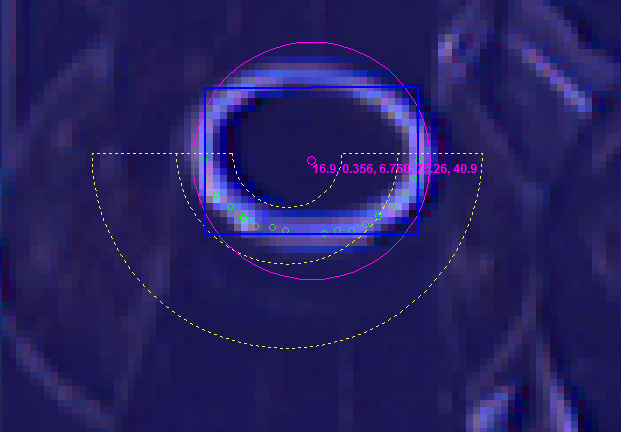
The CircleFinder2D locate low contrast bottle, low resolution in color images captured with wide angle web cameras. By clever algorithms an ellipse is fitted using the valid ellipse edge points.
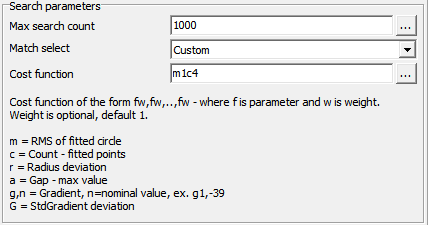
- New – Clever user defined cost function
The user defined cost function lest the user define the criteria for selection the “best” circle located by the ransac algorithm
- New – User define ransac iteration through Multi-Search Function
A challenge with ransac based tools is to generate independant samples to be able to find the best solution. With the user defined MultiSearch multiple search for edge points can be be specified. More of less all the parameters of the CircleFinder2D can be iterated: origin, fitted points, traceline width, steps and search count. When a solution is found with acceptable cost function the search can be terminated to optimize the system solution speed.
- Accurate – Dual Pass doubles accuracy be two step edge location
- Accurate – locates circles based on sub-.pixel edge detection
- Robust – Extensive set of contraints to improve ransac point / solution selection
- Perspective – EllipseFit fits circles with perspective properly
- Flexible – Option to set minimuym number of points to %
- Fast – Multiple CircleFinder2D can be processed in parallel using the Scorpion Tool Threading
- All the search results are available for investigation to understand the circle fitting process.
- Advanced – The results can be used for validation and verification in 3D space increasing the accuracy and robustness of a Scorpion 3D Stinger system.
Summary
The tool is created to solve the true challenges of location of round objects in 2D and 3D machine vision. The tool are significantly increasing the robustness and accuracy of our Scorpion 3D Stinger based solutions with respect to automated 3D calibration and feature location.


You must be logged in to post a comment.