We are again proud to release another update of our continously evolving 2D and 3D Machine Vision Framework. This release is a result of a number of extremely challenging Scorpion 3D Stinger stereo vision projects and our continous effort. To match the challenges we have again revised and refine our cutting-edge 2D machine vision tools to stand the heat from real-world 3D pallet picking, 3D location.
In the complete 10.2 series there are many very impressive additions:
- A “new” TemplateFinder3 – the most important tool in Scorpion Vision
- Handle Multiple ROIs, dynamic template activation and addition of “no-match edges”
- more details given in release notes
- A good general speed improvements in Arllib image processing module
- Interpolation Management from the Toolbox
- Significantly lower overhead in image capture targetting real-time 3D tracking with robots
- New tool for LaserTriangulation – LaserProfiler3D
- creates 3D point clouds and ordered intensity image in real-time
- handles framecounts up to 100 to 300 Hz or 3D profiles
- Easy to use string filtering to allow pre and postfilter operations.
- Soon – Scorpion Image Sentinel 3 a smart image or videorecorder supporting Scorpion 2D Stinger and 3D Stinger Camera
- Dense 3D Stereo Vision Creation support with Scorpion 3D Stinger Camera
- useful for empty box application and many other applications
- with and without structured light

and generation of a dense 3D model
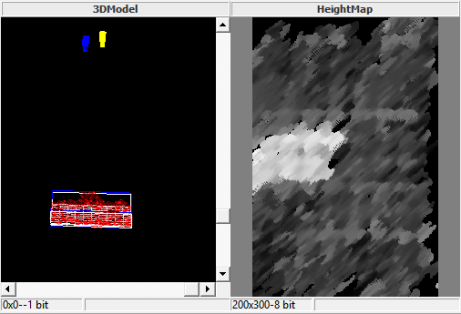
all in 283 ms on an quad core i7
The pose of the cameras shown above the point cloud
- Scorpion Tool Components provide more and more functionality to Scorpion Users
- Support for latest OpenCV 2.4.8
- Scorpion Vision Installer is updated with latest STC, drivers and extension libraries.
Release Notes for Scorpion Vision Software 10.2.1.568
- Scorpion Arrlib is 10-20 % faster – a general and important improvement
- choosing the right interpolation mode can provide an additional 5-15 %
- Interpolation mode is managed from the toolbox
- NN – Nearest neighbor is chosen for speed
- Bilinear is the default
- Cubic provides an accurate option for special cases
- Smart Wide does a smart job on wide tracelines
- Important – TemplateFinder3 is a complete new tool –
- prefilter for improved matching
- multiroi for multiple inspection from one tf3
- better explanation of resampling modes
- important when working in 3D
- better default values
- regex for dynamic templates
- saving templates to files for faster context switching
- very important – “No Match Edges”
- —> can define no match polygons/edges to better segment detection
- can be vital addition to tf3 for demanding applications
- many improvements and some bug-fixes
- Dense 3D Imaging uisng Stereoscopic Camera is supported using
- STC-0084 StereoRectify3D 1.0.0.2
- STC-0083 DisparityMap3D 0.9.1.9
- Check – STP-0072-DisparityMap 1.0.0.2
- ColorSegmentor is now a much better tool
- with postfilter, named filters and dynamic filteractivation
- check STP-0075-ColorSegmentor
- Latest OpenCV 2.4.8 is supported
- updated to the latest Numpy 1.8.0 and SciPy 0.13.2 versions
- A huge update to Scorpion Tool Components –
- download all to the Scorpion template directory and get the fine and useful extensions
- more than 50 STCs are moved to release state
- Updated GUI and Icons
- ImageLogger can set disk limit to 1 GByte down from 5 GByte
- Soon to be available a SVM – Support Vector Machine classification STC
- state of the art machine learning in a clever STC package
Updated Scorpion Test and Demo Profiles
- SDP-0087 Advanced Training – 3D Pizza Measurement – version 1.0.0.7
- real-time 3d point cloud generation with new LaserProfiler3D
- SDP-2012-0019-3DPipePicking
- Demonstration of 3D Pipe Picking from a bin using Scorpion 3D Stinger Stereo Vision
- STP-0073-Scorpion-Toolbox-Performance 1.0.0.3
- valuable test program to benchmark Scorpion Computers
- SDP-2012-0019-3DPipePicking 1.0.0.21
- Demonstration of 3D Pipe Picking using Scorpion 3D Stinger Stereo Vision
- SDP-2012-0018-3DPipeBinPicking
- Demonstration of 3D Pipe Picking from a bin using Scorpion 3D Stinger Stereo Vision
- SDP-2012-0041-Locate-3D-Empty 1.0.0.14
- Practical solution to detect empty box using two multiline lasers
- STP-0072-DisparityMap 1.0.0.2
- Empty box using beta DisparityMap3D STC – super dense 3D image generation based on stereoscopic images
STC – Scorpion Tool Components Updates
- STC-0001-MinimumPolygonToPolygonDistance_2.1.0.22
- STC-0011-ImageFilter_3.3.0.33
- STC-0022-LocateEdgePoint3D_1.2.0.39
- STC-0025-PolygonExtrema_1.0.0.10
- STC-0034-PolygonFilter2D_1.1.0.40
- STC-0036-SortLocate3D_1.1.0.21
- STC-0038-FitLine3D_1.2.0.22
- STC-0043-PointInPolygon2D_1.0.0.4
- STC-0055-FindPaths2D_1.0.0.20
- STC-0064-LocatePaths3D_1.0.0.24
- New – STC-0008-Visualize3D_1.2.0.12
- New – STC-0078-GridMapper_0.9.0.8
- New – STC-0084 StereoRectify3D_1.0.0.1
- New – STC-0082 MultiExpoMerger_0.9.0.2
- New – STC-0066-PolygonMaskImage_1.0.0.5
Learn more and register for download

You must be logged in to post a comment.