 This post is the first in series of Scorpion Vision Software tool improvements included in upcoming – Scorpion Vision XII.
This post is the first in series of Scorpion Vision Software tool improvements included in upcoming – Scorpion Vision XII.
Working with 3D Stereo Vision we have learned that completely removing lens distortion is extremely important – this require the best sub-pixel grid location algorithms. In 3D Robot Vision significant value is added by moving closer using wideangle lenses.
We also use this capability to make high precision 3D Stereo Vision system for our OEM customer using low cost lenses and cameras in the smallest form-factor.

We are proud to state that we have added “Auto Grid Detection” that starts in the center of the images and locates all points that is located with proper quality. This means that Calibrator2D will use all visible grid points that are visible in the image – this will ensure almost 100 % coverage of the image.

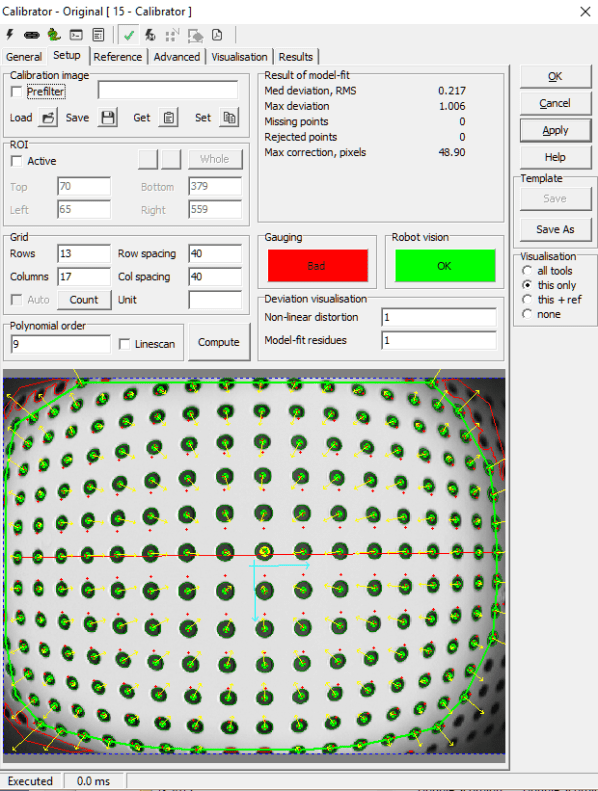
The Calibrator2D.Setup page shows the user feedback after calibrating this image. We see that only the corners are left uncalibrated – where the lens more or less sees to infinity 🙂
The average error is subpixel 1/5th of pixel. The maximum correction of a pixel is 48.9 pixels – the pixel size is 0.9 mm equal to 45 mm.

You must be logged in to post a comment.