
Scorpion 3D Stinger for Robot Vision task
The task is to pick object from a box with an ABB robot. The Scorpion 3D Stinger for Robot Vision was chosen to solve the task.
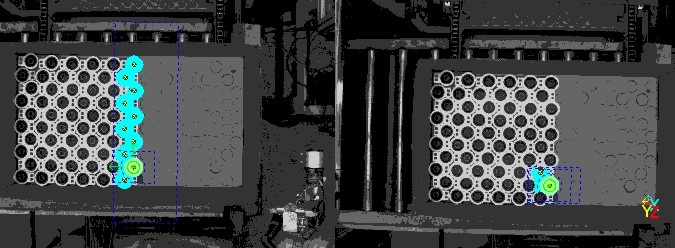
Below the two stereoscopic images is shown captured by the system.
Application details

- Pallet size: 1200 x 800 mm
- Number of layers: 6
- Z- span of layers are from 550 mm
- Z distance to Camera from 3D base reference system/robot work object: 2490 mm
- Scorpion 3D Stinger Camera
- Stereo Visio baseline: 300 mm
- 2D pixel resolution 1.5 mm
- Two monochrome GigE cameras with XGA,1024×768, resolution
- 3D calibration rms value is 0.3 mm
- Estimated z-resolution – standard deviation 1.5 mm
- Scorpion 3D Stinger for Robot Vision
- Industrial PC – Intel Quad-Core 2.4 GHz
- Windows Operating System
Z-Height resolution from 150 mm to 600 mm

- This image shows that the six layers spans 350 mm height and that
- the height difference within one layers is 15 mm.
- The accuracy in z is plus / minus 2-3 mm.
Read more about this application – video – 3d-bin-picking-with-scorpion-3d-stinger

5 comments